|
Paul Maria Scheikl I am an applied scientist at Amazon Robotics in Berlin, working on the Vulcan project. I was a postdoc at Johns Hopkins University working under the guidance of Axel Krieger in the Laboratory for Computational Sensing and Robotics (LCSR). I received my PhD (Dr.-Ing.) from the Department of Artificial Intelligence in Biomedical Engineering at the Friedrich-Alexander University Erlangen-Nürnberg in Germany, where I was advised by Franziska Mathis-Ullrich. Email / Scholar / Github / Doctoral Thesis |

|
ResearchMy research interests lie at the intersection of robotics, computer vision, and machine learning. I am particularly interested in learning visumotor policies for complex object manipulation tasks. During my doctoral studies, I worked on imitation learning, reinforcement learnig, semantic segmentation, deformable object simulation, and sim-to-real transfer. |
|
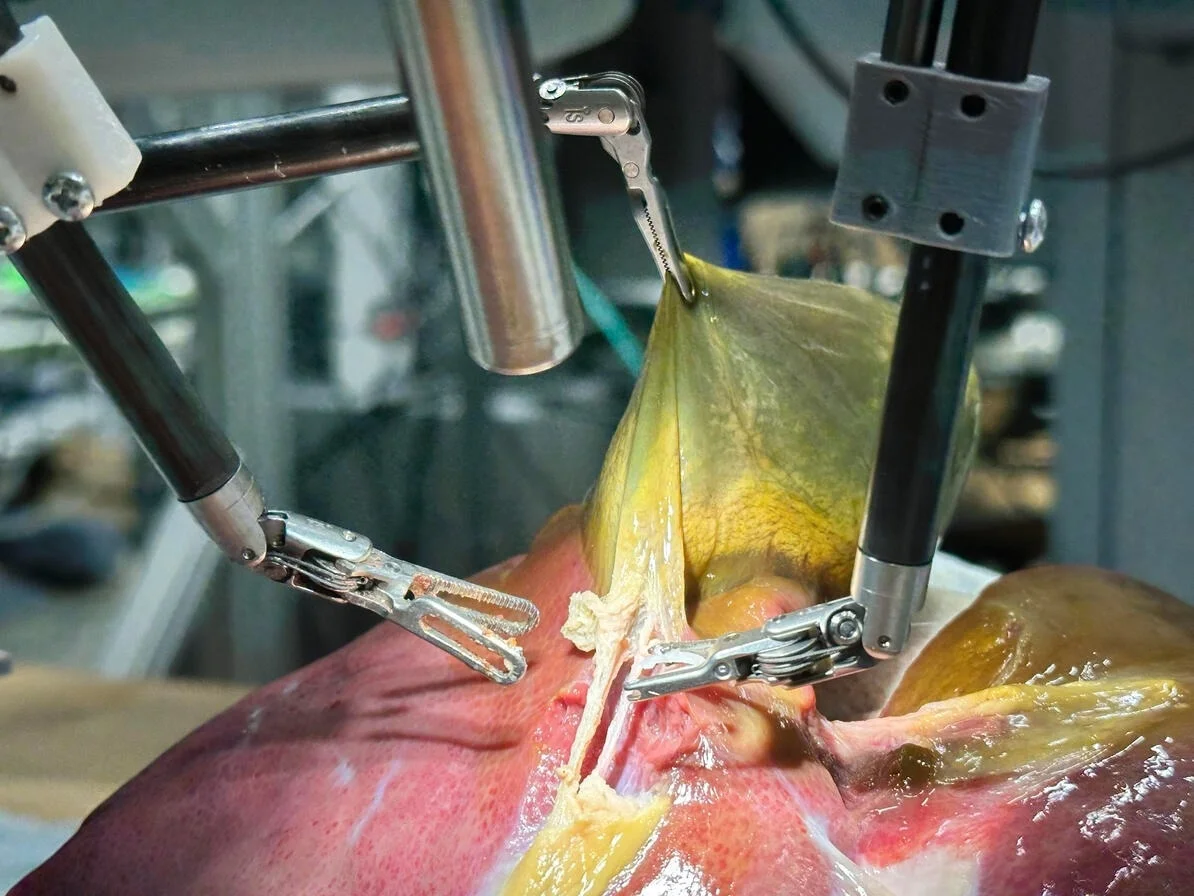
SRT-H: A hierarchical framework for autonomous surgery via language-conditioned imitation learning
Ji Woong Kim, Juo-Tung Chen, Pascal Hansen, Lucy Xiaoyang Shi, Antony Goldenberg, Samuel Schmidgall, Paul Maria Scheikl, Anton Deguet, Brandon M White, De Ru Tsai, Richard Jaepyeong Cha, Jeffrey Jopling, Chelsea Finn, Axel Krieger Science Robotics, 2025 Learns a hierarchical policy for autonomous surgery using language-conditioned imitation learning. The high-level policy receives image data and produces a natural language instruction. The low-level policy receives the language instruction and image data and generates robotic motions. The framework is evaluated on the da Vinci Research Kit on ex-vivo porcine organs for laparoscopic cholecystectomy. |
|
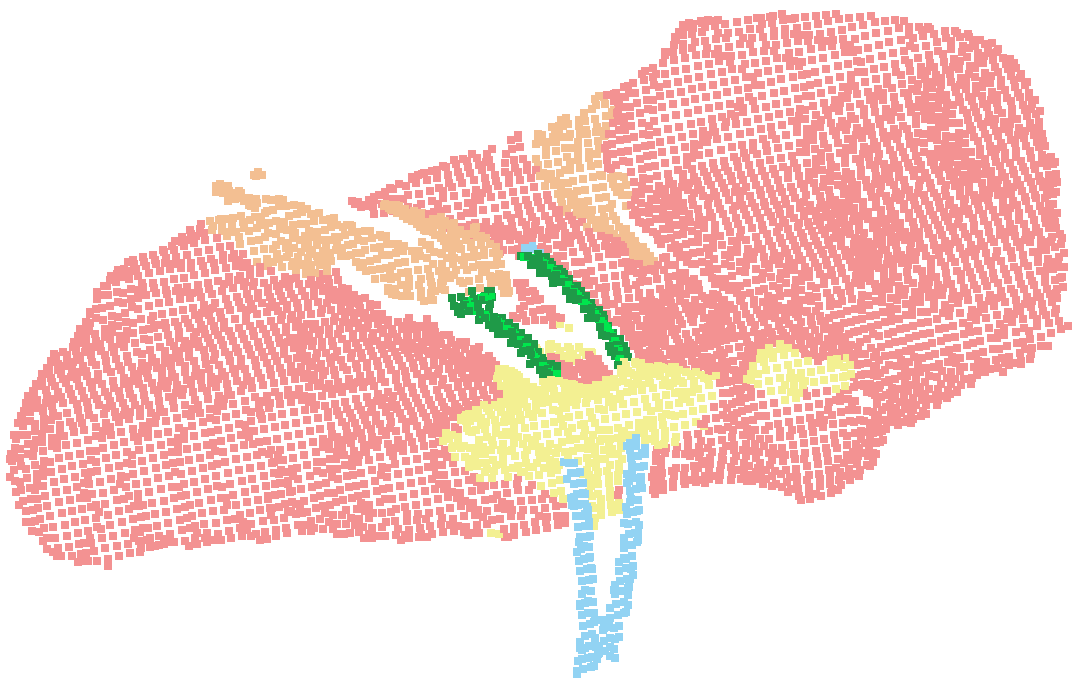
Point Cloud Segmentation for Autonomous Clip Positioning in Laparoscopic Cholecystectomy on a Phantom
Balázs Gyenes, Nikolai Franke, Paul Maria Scheikl, Pit Henrich, Rayan Younis, Gerhard Neumann, Martin Wagner, Franziska Mathis-Ullrich IEEE Robotics and Automation Letters (RA-L), 2025 code Presents the first robotic system to demonstrate autonomous clip positioning on a physical phantom in laparoscopic surgery. The system segments a colorless point cloud from a single camera, extracts target positions for the clips using spline interpolation, and allows human operators to adjust the targets. The segmentation model is trained on only 60 hand-labeled real point clouds, reflecting data scarcity in the surgical domain. The system achieves a localization precision of 0.75 mm at a 95% success rate and executes autonomous clip positioning with a 100% success rate. |
|
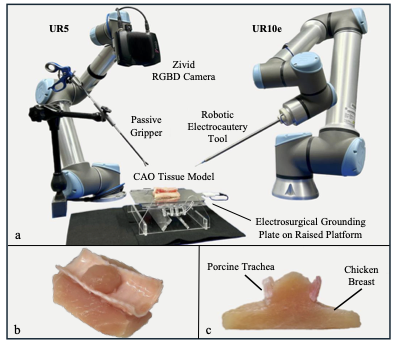
Autonomous Vision-Guided Resection of Central Airway Obstruction
Mariana E. Smith, Nural Yilmaz, Tanner Watts, Paul Maria Scheikl, Jiawei Ge, Anton Deguet, Alan Kuntz, Axel Krieger Journal of Medical Robotics Research (JMRR), 2025 Vision-guided, autonomous approach for palliative resection of tracheal tumors. Models the tracheal surface with a fifth-degree polynomial to plan tool trajectories. Aegmentation pipeline identifies the trachea and tumor boundaries. |
|
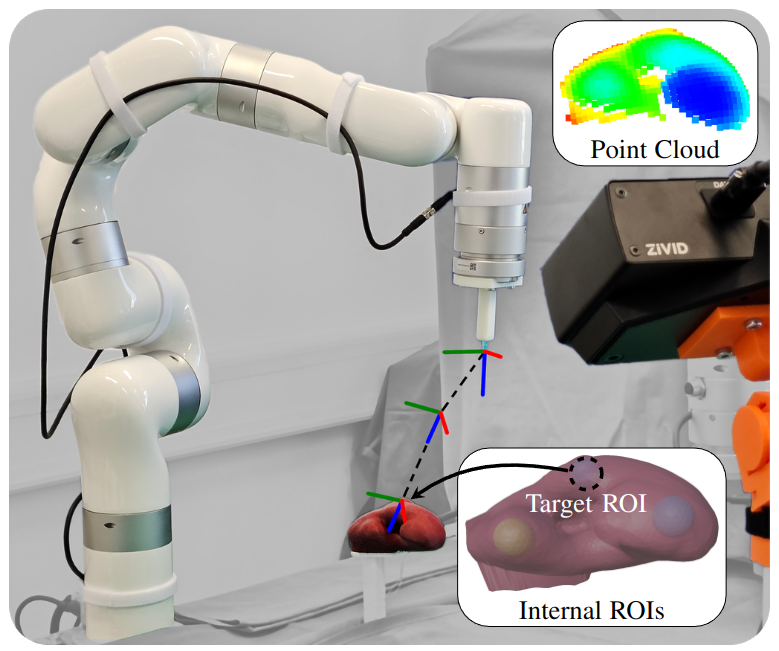
LUDO: Low-Latency Understanding of Deformable Objects Using Point Cloud Occupancy Functions
Pit Henrich, Franziska Mathis-Ullrich, Paul Maria Scheikl IEEE Transactions on Robotics (T-RO), 2025 Reconstructs a complete deformable object, including deformed internal structures, from a single point cloud observation. We use the reconstructed object to plan a robotic path to puncture internal regions of interest. Deformable object reconstruction eliminates the need for deformable object registration! |
|
Lens Capsule Tearing in Cataract Surgery using Reinforcement Learning
Rebekka Charlotte Peter, Steffen Peikert, Ludwig Haide, Doan Xuan Viet Pham, Tahar Chettaoui, Eleonora Tagliabue, Paul Maria Scheikl, Johannes Fauser, Matthias Hillenbrand, Gerhard Neumann, Franziska Mathis-Ullrich IEEE International Conference on Robotics and Automation (ICRA), 2024 Demonstrates simulation and policy learning of lens capsule tearing in cataract surgery using reinforcement learning. |
|
Movement Primitive Diffusion: Learning Gentle Robotic Manipulation of Deformable Objects
Paul Maria Scheikl, Nicolas Schreiber, Christoph Haas, Niklas Freymuth, Gerhard Neumann, Rudolf Lioutikov, Franziska Mathis-Ullrich. IEEE Robotics and Automation Letters (RA-L), 2024 code / website Combines the versatility of diffusion-based imitation learning with the high-quality motion generation capabilities of Probabilistic Dynamic Movement Primitives. Achieves gentle manipulation of deformable objects, while maintaining data efficiency critical for surgical applications where demonstration data is scarce. Evaluated in simulation and on real robotic hardware. |
|
Registered and Segmented Deformable Object Reconstruction From a Single View Point Cloud
Pit Henrich, Balázs Gyenes, Paul Maria Scheikl, Gerhard Neumann, Franziska Mathis-Ullrich. IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), 2024 3D reconstruction and segmentation of deformable objects from a single view point cloud. Also introduces a simple sampling algorithm to generate better training data for occupancy learning. |
|
LapGym - An Open Source Framework for Reinforcement Learning in Robot-Assisted Laparoscopic Surgery
Paul Maria Scheikl, Balázs Gyenes, Rayan Younis, Christoph Haas, Gerhard Neumann, Martin Wagner, Franziska Mathis-Ullrich. Journal of Machine Learning Research (JMLR), 2023 code: lap_gym / sofa_env Reinforcement learning framework for robot-assisted laparoscopic surgery. Builds on the open-source, fast, interactive FEM simulation backend SOFA. Deformable object manipulation, topological changes (cutting), grasping, image observation modalities (RGB, depth, segmentation, point clouds). |


|
Grounding Graph Network Simulators using Physical Sensor Observations
Jonas Linkerhägner, Niklas Freymuth, Paul Maria Scheikl, Franziska Mathis-Ullrich, Gerhard Neumann. International Conference on Learning Representations (ICLR), 2023 Integrate sensory information to ground Graph Network Simulators on real world observations. Predict the mesh state of deformable objects by utilizing point cloud data. |
|
Sim-to-Real Transfer for Visual Reinforcement Learning of Deformable Object Manipulation for Robot-Assisted Surgery
Paul Maria Scheikl, Eleonora Tagliabue, Balázs Gyenes, Martin Wagner, Diego Dall'Alba, Paolo Fiorini, Franziska Mathis-Ullrich. IEEE Robotics and Automation Letters (RA-L), 2022 Training a visumotor policy for deformable object manipulation in simulation with reinforcement learning. Transferring the policy to the real world with the daVinci Research Kit using unpaired image-to-image translation. |
|
Cooperative assistance in robotic surgery through multi-agent reinforcement learning
Paul Maria Scheikl, Balázs Gyenes, Tornike Davitashvili, Rayan Younis, André Schulze, Beat P Müller-Stich, Gerhard Neumann, Martin Wagner, Franziska Mathis-Ullrich. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021 Learns decentralized policies without a human in the loop with multi-agent reinforcement learning. Evaluates the learned policies in cooperation with a human surgeon for deformable object manipulation. |
|
Deep learning for semantic segmentation of organs and tissues in laparoscopic surgery
Paul Maria Scheikl, Stefan Laschewski, Anna Kisilenko, Tornike Davitashvili, Benjamin Müller, Manuela Capek, Beat P Müller-Stich, Martin Wagner, Franziska Mathis-Ullrich. Current Directions in Biomedical Engineering (CDBE), 2020 Evaluates several architectures and training strategies for semantic segmentation of organs and tissues in laparoscopic surgery. |